ការធ្វើឱ្យមានដំណើរការល្អប្រសើរជាមួយ MPU-6050: តំឡើងការក្រិតក្រិតនិងកម្មវិធី
2024-04-25
9231
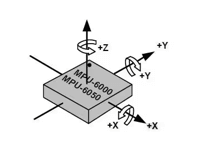
MPU-6050 គឺជាសមាសធាតុនៃដំណើរការកែច្នៃចលនា 6 អ័ក្សលើកដំបូងរបស់ពិភពលោកដែលធ្វើសមាហរណកម្ម 3 អ័ក្សអ័ក្សទំហំ 3 អ័ក្សបង្កើនល្បឿននិងប្រព័ន្ធចលនាចលនាឌីជីថលដែលអាចធ្វើមាត្រដ្ឋានបាន (DMP) ។គោលបំណងនៃការប្រើប្រាស់វាគឺដើម្បីទទួលបានមុំដែលមានទំនោរក្នុងការវាស់វែង (ដូចជា quadcopter មួយឡានមានតុល្យភាព) នៅលើ x, y និង Z ដែលមានមុំជម្រាលមុំជម្រាលមុំរាងពងក្រពើនិងមុំយាយ។យើងអានទិន្នន័យទាំង 6 របស់ MPU-6050 (តម្លៃផ្សាយពាណិជ្ជកម្ម Axception 3 តួអក្សរនិងតម្លៃនៃប្រហោងឆ្អឹងអ័ក្ស 3) តាមរយៈចំណុចប្រទាក់ I2C ។បន្ទាប់ពីដំណើរការនៃការលាយបញ្ចូលគ្នា, ទីលាន, រមៀល, រមៀលនិងមុំយាយអាចត្រូវបានគណនា។ជាឯកសារយោងទិសដៅសម្រាប់តម្លៃវាស់វែងនិយមន័យនៃឧបករណ៍សម្រុះសម្រួលឧបករណ៍ចាប់សញ្ញាត្រូវបានបង្ហាញក្នុងរូបខាងក្រោមដែលធ្វើតាមគោលការណ៍នៃប្រព័ន្ធកូអរដោនេខាងស្តាំ (នោះគឺជាចំណុចខាងស្តាំនៃទិសដៅវិជ្ជមាននៃទិសដៅវិជ្ជមាននៃ X-អ័ក្ស, ម្រាមដៃចង្អុលបង្ហាញពីទិសដៅវិជ្ជមាននៃអ័ក្សអ៊ីនិងម្រាមដៃម្រាមដៃកណ្តាលទៅទិសដៅវិជ្ជមាននៃអ័ក្ស Z ។
កាតាលូក
ជាមួយនឹងឡានក្រុងសន្ទុះ I2C របស់ខ្លួន MPU-605 អាចទទួលបានការបញ្ចូលដោយផ្ទាល់ពីត្រីវិស័យ 3 អ័ក្សខាងក្រៅដែលផ្តល់នូវលទ្ធផលនៃចលនាទំហំ 9 អ័ក្ស។វាលុបបំបាត់បញ្ហាភាពខុសគ្នារវាងការកំណត់ពេលវេលា gyroscope និងការបង្កើនល្បឿនបញ្ចូលគ្នានិងកាត់បន្ថយទំហំវេចខ្ចប់គួរឱ្យកត់សម្គាល់បើប្រៀបធៀបទៅនឹងដំណោះស្រាយពហុគុណ។នៅពេលភ្ជាប់ទៅនឹងម៉ែត្រអ័ក្សបីអ័ក្ស MPU-60X មានសមត្ថភាពផ្តល់នូវលទ្ធផលលាយបញ្ចូលគ្នាចំនួន 9 អ័ក្សពេញលេញទៅកំពង់ផែ I2C ឬ SPI ចម្បងរបស់វា (ចំណាំថាកំពង់ផែ SPI អាចប្រើបានតែលើ MPU-6000 ប៉ុណ្ណោះ) ។
ជម្មើសជំនួសនិងសមភាព
- MPU-3300
- MPU-6000
- MPU-6500
ក្រុមហ៊ុនផលិត MPU-6050
ក្រុមហ៊ុនផលិត MPU-6050 គឺ TDK ។បន្ទាប់ពីស្ថាបនិកពីរនាក់នៃ TDK, វេជ្ជបណ្ឌិត Yogoro Kato និង Takii Tani បានបង្កើត Ferrite នៅទីក្រុងតូក្យូពួកគេបានបង្កើតទីក្រុង Tokyo Denkikagaku Kogyo Kogyo K.k.ក្នុងនាមជាម៉ាកឧស្សាហកម្មអេឡិចត្រូនិចសកល TDK តែងតែរក្សាជំហរលេចធ្លោមួយនៅក្នុងវិស័យវត្ថុធាតុដើមអេឡិចត្រូនិចនិងគ្រឿងអេឡិចត្រូនិចអេឡិចត្រូនិច។ផលប័ត្រផលិតផលដែលជំរុញដោយ TDK និងការច្នៃប្រឌិតថ្មីគ្របដណ្តប់លើសមាសធាតុអកម្មដូចជាឧបករណ៍បង្កើនសមត្ថភាពនៃភាពយន្តអាលុយមីញ៉ូម, សមាសធាតុម៉ាញេទិក, សមាសធាតុ piezoelectric, ក៏ដូចជាប្រព័ន្ធឧបករណ៏និងសម្ពាធ,លើសពីនេះទៀត TDK ក៏ផ្តល់នូវឧបករណ៍ផ្គត់ផ្គង់ម៉ាញេទិកនិងម៉ាញេទិកផងដែរ TDK ក៏ផ្តល់នូវការផ្គត់ផ្គង់ថាមពលនិងឧបករណ៍ថាមពលផងដែរក្បាលម៉ាញេទិកនិងផលិតផលផ្សេងទៀត។យីហោផលិតផលរបស់វារួមមាន TDK, Epcos, បងថ្លៃបង្ផស្ស, មីក្រូណាស, Tronics និង Tdk-Lambda ។
ដ្យាក្រាមប្លុកខាងក្នុងនៃ MPU-6050
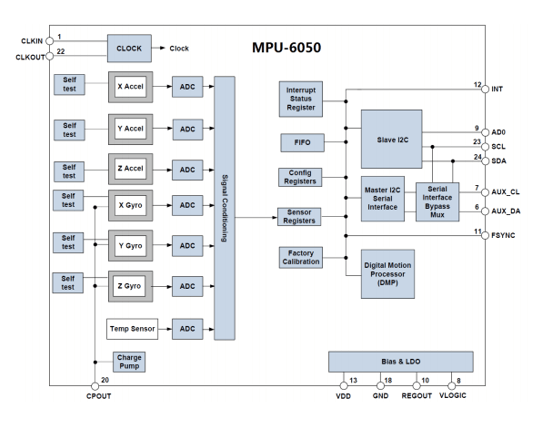
ក្នុងនោះអេសអិលអេសអេសអេសអេសអេសអេសអេសអេសអេសអេសអេសអ៊ីស៊ីភ្ជាប់ទៅនឹង MCU ហើយ MCU គ្រប់គ្រង MPU-6050 តាមរយៈចំណុចប្រទាក់ IIC នេះ។វាក៏មានចំណុចប្រទាក់អាយអាយស៊ីផងដែរគឺ aux_cl និង aux_da ។ចំណុចប្រទាក់នេះអាចត្រូវបានប្រើដើម្បីភ្ជាប់ឧបករណ៍ទាសករខាងក្រៅដូចជាឧបករណ៍ចាប់សញ្ញាម៉ាញេទិកដើម្បីបង្កើតឧបករណ៍ចាប់សញ្ញាប្រាំបួន។vlogic គឺជាវ៉ុលកំពង់ផែអាយអូ។ម្ជុលនេះអាចគាំទ្រដល់អប្បបរមា 1.8V ។ជាធម្មតាយើងភ្ជាប់វាដោយផ្ទាល់ទៅវីឌីឌី។AD0 គឺជាលេខកូដសម្ងាត់ត្រួតពិនិត្យអាសយដ្ឋានរបស់អន្តរមុខ IIK របស់ IIC (ភ្ជាប់ទៅនឹង MCU) ។ម្ជុលនេះគ្រប់គ្រងកម្រិតទាបបំផុតនៃអាសយដ្ឋាន IIC ។ប្រសិនបើវាត្រូវបានភ្ជាប់ទៅនឹង GND អាសយដ្ឋាន IIC របស់ MPU-6050 គឺ 0x68;ប្រសិនបើវាត្រូវបានភ្ជាប់ទៅ VDD វាគឺ 0x69 ។សូមកត់សម្គាល់ថាអាស័យដ្ឋាននៅទីនេះមិនរាប់បញ្ចូលការបញ្ជូនទិន្នន័យទាបបំផុត (ប៊ីតទាបបំផុតត្រូវបានប្រើដើម្បីតំណាងឱ្យប្រតិបត្តិការអាននិងសរសេរ) ។នៅលើ Mwbalancedstc15, ad0 ត្រូវបានភ្ជាប់ទៅនឹង GND, ដូច្នេះអាសយដ្ឋាន IIC របស់ MPU-6050 គឺ 0x68 (មិនរាប់បញ្ចូលកម្រិតទាបបំផុត) ។
ចាប់ផ្តើមចំណុចប្រទាក់អាយអាយស៊ី
MPU-6050 ប្រើ IIC ដើម្បីទំនាក់ទំនងជាមួយ STC15 ដូច្នេះយើងចាំបាច់ត្រូវចាប់ផ្តើមបន្ទាត់ទិន្នន័យ SDA និង SCL ភ្ជាប់ទៅ MPU-6050 ជាមុនសិន។
កំណត់ MPU-6050
ជំហាននេះស្តារអ្នកចុះឈ្មោះទាំងអស់នៅខាងក្នុង MPU-6050 ទៅតម្លៃលំនាំដើមរបស់ពួកគេដែលត្រូវបានសម្រេចដោយការសរសេរ 1 ទៅប៊ីត 7 នៃការគ្រប់គ្រងថាមពល 1 (0x6B) ។បន្ទាប់ពីកំណត់ឡើងវិញនោះការគ្រប់គ្រងថាមពលទី 1 នឹងត្រូវបានស្តារឡើងវិញនូវតម្លៃលំនាំដើម (0x40) ហើយការចុះឈ្មោះនេះត្រូវតែកំណត់ទៅ 0x00 ដើម្បីដាស់ MPU-6050 ហើយដាក់វាទៅក្នុងស្ថានភាពការងារធម្មតា។
កំណត់ជួរនៃឧបករណ៏ល្បឿននៃបំពង់ទឹកផ្កាពេញលេញ (Gyro) និងឧបករណ៍ចាប់សញ្ញាបង្កើនល្បឿន
ក្នុងជំហ៊ាននេះយើងបានកំណត់ជួរពេញលេញនៃឧបករណ៍ចាប់សញ្ញាទាំងពីរតាមរយៈការចុះឈ្មោះការកំណត់រចនាសម្ព័ន្ធ Gyroscope (0x1b) និងការចុះឈ្មោះការកំណត់រចនាសម្ព័ន្ធឧបករណ៍ចាប់សញ្ញាបង្កើនល្បឿន (0x1C) រៀងៗខ្លួន។ជាធម្មតាយើងកំណត់ជួរទំហំពេញលេញនៃ gyroscope ទៅ± 2000dps និងជួរពេញលេញនៃឧបករណ៍វាស់ល្បឿនទៅ± 2g ។
កំណត់ប៉ារ៉ាម៉ែត្រផ្សេងទៀត
នៅទីនេះយើងត្រូវកំណត់រចនាសម្ព័ន្ធប៉ារ៉ាម៉ែត្រខាងក្រោមនេះផងដែរ: បិទការរំខានបិទដំណើរការចំណុចប្រទាក់ AUX I2C, បិទ FIFO កំណត់អត្រាការយកគំរូ gyroscope និងកំណត់រចនាសម្ព័ន្ធតម្រងឆ្លងកាត់ឌីជីថល (DLPF) ។ដោយសារយើងមិនប្រើការរំខានក្នុងការអានទិន្នន័យក្នុងជំពូកនេះមុខងាររំខានចាំបាច់ត្រូវបិទ។ក្នុងពេលជាមួយគ្នានេះដែរចាប់តាំងពីយើងមិនប្រើចំណុចប្រទាក់ AUX I2C ដើម្បីភ្ជាប់ឧបករណ៍ចាប់សញ្ញាខាងក្រៅផ្សេងទៀតយើងក៏ត្រូវបិទចំណុចប្រទាក់នេះដែរ។មុខងារទាំងនេះអាចត្រូវបានគ្រប់គ្រងតាមរយៈការចុះឈ្មោះបន្ថែម (0x38) និងការចុះឈ្មោះត្រួតពិនិត្យអ្នកប្រើ (0x6a) ។MPU-6050 អាចប្រើ FIFO ដើម្បីរក្សាទុកទិន្នន័យឧបករណ៍ចាប់សញ្ញាប៉ុន្តែយើងមិនបានប្រើវានៅក្នុងជំពូកនេះទេដូច្នេះបណ្តាញ FIFO ទាំងអស់ត្រូវការបិទ។នេះអាចត្រូវបានគ្រប់គ្រងតាមរយៈការចុះឈ្មោះបើក FIFO (0x23) ។តាមលំនាំដើមតម្លៃនៃការចុះឈ្មោះនេះគឺ 0 (នោះគឺ FIFO ត្រូវបានបិទ) ដូច្នេះយើងអាចប្រើតម្លៃលំនាំដើមដោយផ្ទាល់។អត្រាគំរូនៃ Gyroscope ត្រូវបានគ្រប់គ្រងដោយការចុះបញ្ជីបែងចែកអត្រាការយកគំរូ (0x19) ។ជាធម្មតាយើងកំណត់អត្រាគំរូនេះដល់ 50. ការកំណត់រចនាសម្ព័ន្ធនៃតម្រងឌីជីថលទាប (DLPF) ត្រូវបានបញ្ចប់តាមរយៈការចុះឈ្មោះការកំណត់រចនាសម្ព័ន្ធ (0x1a) ។និយាយជាទូទៅយើងនឹងកំណត់ DLPF ទៅពាក់កណ្តាលកម្រិតបញ្ជូនដើម្បីធ្វើឱ្យមានតុល្យភាពទិន្ន័យនិងល្បឿនឆ្លើយតប។
កំណត់រចនាសម្ព័ន្ធប្រភពនាឡិកាប្រព័ន្ធនិងបើកឧបករណ៍ចាប់សញ្ញាល្បឿននៃល្បឿននិងឧបករណ៍ចាប់សញ្ញាបង្កើនល្បឿន
ការកំណត់នៃប្រភពនាឡិកាប្រព័ន្ធអាស្រ័យលើការគ្រប់គ្រងថាមពលបានចុះឈ្មោះ 1 (0x6b) ដែលប៊ីតទាបបំផុតនៃការចុះឈ្មោះនេះកំណត់ការជ្រើសរើសប្រភពនាឡិកា។តាមលំនាំដើមប៊ីតទាំងបីនេះត្រូវបានកំណត់ទៅ 0 ដែលមានន័យថាប្រព័ន្ធប្រើលំយោល 8MHz RC ដែលមានប្រភពនាឡិកា។ទោះយ៉ាងណាក៏ដោយដើម្បីធ្វើឱ្យប្រសើរឡើងនូវភាពត្រឹមត្រូវនាឡិកានេះយើងច្រើនតែកំណត់វាទៅ 1 ហើយជ្រើសរើស x-axis gyroscope pll ជាប្រភពនាឡិកា។លើសពីនេះទៀតការបើកដំណើរការឧបករណ៏ល្បឿននៃទឹកមាត់និងឧបករណ៍ចាប់សញ្ញាបង្កើនល្បឿនក៏ជាជំហានសំខាន់មួយក្នុងដំណើរការចាប់ផ្តើម។ប្រតិបត្ដិការទាំងពីរត្រូវបានអនុវត្តតាមរយៈការចុះឈ្មោះអំណាចចុះឈ្មោះ 2 (0x6C) ។គ្រាន់តែកំណត់ប៊ីតដែលត្រូវគ្នាទៅ 0 ដើម្បីធ្វើឱ្យឧបករណ៍ចាប់សញ្ញាដែលត្រូវគ្នាសកម្ម។បន្ទាប់ពីបញ្ចប់ជំហានខាងលើ MPU-6050 អាចបញ្ចូលស្ថានភាពការងារធម្មតា។អ្នកចុះឈ្មោះទាំងនោះដែលមិនមានកំណត់ពិសេសនឹងទទួលយកតម្លៃលំនាំដើមដែលបានកំណត់ជាមុនដោយប្រព័ន្ធ។
តើការងារ MPU-6050 យ៉ាងដូចម្តេច?
ឧបករណ៏ Gyro
ឧបករណ៏នេះត្រូវបានបំពាក់ដោយ Gyroo ខាងក្នុងដែលនឹងនៅតែស្របគ្នានឹងទិសដៅដំបូងដោយសារតែឥទ្ធិពលនៃ Gyroscopic ។ដូច្នេះយើងអាចគណនាទិសដៅនិងមុំនៃការបង្វិលដោយរកឃើញគម្លាតនៃជីវរ៉ូពីទិសដៅដំបូង។
ឧបករណ៏ឧបករណ៍វាស់ល្បឿន
ឧបករណ៏ឧបករណ៍វាស់ល្បឿនគឺជាឧបករណ៍ដែលអាចវាស់ការបង្កើនល្បឿនហើយវាដំណើរការដោយផ្អែកលើគោលការណ៍នៃប្រសិទ្ធិភាព piezoelectric ។ក្នុងអំឡុងពេលនៃការបង្កើនល្បឿនឧបករណ៍ចាប់សញ្ញាវាស់កម្លាំងនិចលភាពដែលបានអនុវត្តទៅលើប្លុកម៉ាស់ហើយបន្ទាប់មកគណនាតម្លៃបង្កើនល្បឿនដោយប្រើច្បាប់ទី 2 របស់ញូតុន។
ដំណើរការចលនាឌីជីថល (DMP)
DMP គឺជាម៉ូឌុលដំណើរការទិន្នន័យក្នុងបន្ទះឈីប MPU605 ដែលមានក្បួនតម្រងរបស់ Kalman សម្រាប់ការទទួលបានទិន្នន័យពីឧបករណ៍ចាប់សញ្ញា Gyroscope និងដំណើរការឧបករណ៍ចាប់សញ្ញា។លក្ខណៈពិសេសនេះកាត់បន្ថយបន្ទុកការងាររបស់មីក្រូវ៉េវគ្រឿងបន្លាស់យ៉ាងខ្លាំងហើយចៀសវាងការត្រងនិងដំណើរការលាយទិន្នន័យ។
កំណត់សំគាល់ៈ
Quatesens: ក្រុមចំនុចគឺជាលេខដែលមានឈ្មោះសាមញ្ញ។ចំនួនកុំផ្លិចផ្សិតត្រូវបានផ្សំឡើងដោយចំនួនពិតបូករួមនឹងអង្គភាពស្រមើលស្រមៃ i ដែលខ្ញុំនៅទីណា 2 = -1 ។
តើ MPU-6050 មានកន្លែងណា?
- ប្រដាប់ប្រដាក្មេងលេង
- ស្មាតហ្វូននិងហ្គេមចល័ត
ឧបករណ៍បញ្ជាហ្គេមដែលមានមូលដ្ឋានលើចលនា
- បច្ចេកវិទ្យាព្រាលអេហ្វសេរី (សម្រាប់ស្ថេរភាពរូបភាពនៅតែមាន)
- បច្ចេកវិទ្យារបស់ Airerign ™ (សម្រាប់សុវត្ថិភាព / ការផ្ទៀងផ្ទាត់ភាពត្រឹមត្រូវ)
ការស្គាល់កាយវិការការស្គាល់កាយវិការ
- ឧបករណ៍ចាប់សញ្ញាដែលអាចពាក់បានសម្រាប់សុខភាពសុខភាពនិងកីឡា
- ល្បែងកំសាន្តនិងកម្មវិធីដែលប្រើកម្មវិធីចលនាចលនា
- បច្ចេកវិទ្យា PotionCommand ™ (សម្រាប់កាយវិការខ្លីកាត់ខ្លី)
- សេវាកម្មដែលមានមូលដ្ឋានលើសេវាកម្មការចាប់អារម្មណ៍និងការគិតគូរពីការស្លាប់
- ការបញ្ជាពីចម្ងាយ 3D សម្រាប់អ៊ិនធឺរណែតដែលភ្ជាប់អ៊ីនធឺណិតនិងកំណត់ប្រអប់ខាងលើកណ្តុរ 3D
- ក្រុមហ៊ុន Touchany West ™បច្ចេកវិទ្យា (សម្រាប់ការត្រួតពិនិត្យពាក្យសុំ UI / No. គ្មាន "ការត្រួតពិនិត្យកម្មវិធី UI)
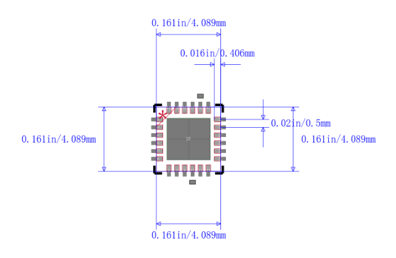
កញ្ចប់ MPU-6050
តើធ្វើដូចម្តេចដើម្បីកាត់បន្ថយសំលេងរំខានរបស់ MPU-6050?
យើងអាចអនុវត្តតាមវិធីដូចខាងក្រោមដើម្បីកាត់បន្ថយសំលេងរំខានរបស់ MPU-6050 ។
ប្រើឧបករណ៍ចាប់សញ្ញាដែលបានក្រិតតាមខ្នាត
ការក្រិតតាមរង្វាស់ឧបករណ៍វាស់ល្បឿននិង gyroscope នៃ MPU-6050 អាចលុបបំបាត់ភាពលំអៀងនិងកំហុសរបស់ឧបករណ៍ចាប់សញ្ញាខ្លួនឯងដូច្នេះកាត់បន្ថយផលប៉ះពាល់នៃសំលេងរំខាន។ដំណើរការនៃការក្រិតខ្នាតជាធម្មតាមានពីរដំណាក់កាល: ការក្រិតតាមខ្នាតឋិតិវន្តនិងការក្រិតតាមខ្នាតចលនា។
ដំណើរការត្រងផ្នែករឹង
ការបន្ថែមឧបករណ៍តម្រងទៅបន្ទាត់ថាមពលរបស់ MPU-6050 អាចកាត់បន្ថយផលប៉ះពាល់នៃសំលេងរំខាននៃការផ្គត់ផ្គង់ថាមពលនៅលើឧបករណ៏។ទន្ទឹមនឹងនេះក្នុងអំឡុងពេលនៃ PCB ប្លង់យើងគួរតែព្យាយាមរក្សា MPU-6050 ឆ្ងាយពីប្រភពសក្តានុពលនៃការជ្រៀតជ្រែកដូចជាខ្សែសញ្ញាដែលមានស្ថេរភាពនិងសមាសធាតុថាមពលខ្ពស់។
ដំណើរការតម្រងកម្មវិធី
បន្ទាប់ពីប្រមូលទិន្នន័យឆៅពី MPU-605 យើងអាចបន្ថែមតំណច្រោះផ្នែកទន់ដើម្បីដំណើរការទិន្នន័យដំបូងដើម្បីលុបបំបាត់ការជ្រៀតជ្រែកដែលមានសំលេងរំខាន។វិធីសាស្ត្រច្រោះផ្នែកទន់ដែលត្រូវបានប្រើជាទូទៅរួមមានការត្រងមធ្យមការត្រងមេដាយកាឡាម៉ាន់ត្រងជាដើម។
ប្រើតម្រងឆ្លងកាត់ទាបខាងក្នុង
MPU-6050 មានតម្រងឆ្លងកាត់ទាបនៅខាងក្នុងដែលអាចត្រូវបានប្រើដើម្បីកាត់បន្ថយសំលេងប្រេកង់ខ្ពស់ដោយកំណត់ប្រេកង់កាត់សក់របស់វា។ជាពិសេសយើងអាចកំណត់ប្រេកង់នៃតម្រងឌីជីថលដោយកែប្រែការចុះឈ្មោះតំឡើងតំឡើង MPU-6050 ដើម្បីលុបបំបាត់សំលេងប្រេកង់ខ្ពស់ដែលបណ្តាលមកពីគំរូ A / D ។
ការគណនាគន្លងចលនាដែលមានមូលដ្ឋានលើ MPU-6050
MPU-6050 គឺជាឧបករណ៍ចាប់សញ្ញាល្បឿន 6 អ័ក្សដែលអាចប្រើបានដើម្បីវាស់ចលនានិងឥរិយាបថរបស់វត្ថុ។ការគណនាគន្លងចលនាផ្អែកលើ MPU-6050 អាចត្រូវបានដឹងតាមជំហានដូចខាងក្រោមៈ
ជំហានដំបូងគឺត្រូវអានទិន្នន័យឧបករណ៍ចាប់សញ្ញា។យើងត្រូវអានទិន្នន័យដែលមានល្បឿនលឿននិងឧបករណ៍វាស់ល្បឿនពីឧបករណ៍ចាប់សញ្ញា MPU-6050 ដោយប្រើមុខងារបញ្ជានិងអនុវត្វបណ្ណាល័យសមស្រប។ទិន្នន័យទាំងនេះជាធម្មតាលទ្ធផលក្នុងទម្រង់ឌីជីថលដូច្នេះការងារបំលែងនិងការក្រិតខ្នាតដែលត្រូវការដើម្បីបំលែងវាទៅជាការវាស់វែងជាក់ស្តែងក្នុងអង្គភាពរូបវ័ន្ត។
ជំហានទី 2 គឺត្រូវគណនាការបង្កើនល្បឿន។ដំបូងយើងត្រូវកែទិន្នន័យពីឧបករណ៍វាស់ល្បឿនដើម្បីទទួលបានការបង្កើនល្បឿននៃវត្ថុក្នុងអ័ក្សនីមួយៗ។បនា្ទាប់មកក្នុងគោលបំណងដើម្បីគណនាល្បឿននិងការផ្លាស់ទីលំនៅរបស់វត្ថុក្នុងអ័ក្សនីមួយៗយើងត្រូវបញ្ចូលទិន្នន័យបង្កើនល្បឿន។បច្ចេកទេសសមាហរណកម្មលេខដូចជាវិធីសាស្រ្តរបស់អយល័រឬវិធីសាស្ត្រ Lunger-Kutta ត្រូវបានប្រើជាញឹកញាប់នៅក្នុងដំណើរការនេះដើម្បីធានាបាននូវភាពត្រឹមត្រូវនៃការគណនាការផ្លាស់ទីលំនៅ។
ជំហានទីបីគឺត្រូវគណនាល្បឿនមុំ។ការប្រើប្រាស់ទិន្នន័យ gyroscope ល្បឿនមុំនៃវត្ថុនៅក្នុងអ័ក្សនីមួយៗអាចត្រូវបានគណនា។ជាថ្មីម្តងទៀតទិន្នន័យនេះចាំបាច់ត្រូវបានក្រិតតាមខ្នាតនិងបំលែងដើម្បីទទួលបានល្បឿនមុំនៅក្នុងអង្គភាពរូបវ័ន្តជាក់ស្តែង។
ជំហានទីបួនគឺត្រូវគណនាការបង្វិល។តាមរយៈការបញ្ចូលទិន្នន័យល្បឿននៃមុំមុំមុំនៃការបង្វិលនៃវត្ថុនៅក្នុងអ័ក្សនីមួយៗអាចត្រូវបានគណនា។នេះអាចត្រូវបានធ្វើដោយប្រើបច្ចេកទេសសមាហរណកម្មលេខដូចជាវិធីសាស្រ្តរបស់អយល័រឬវិធីសាស្ត្រលំអៀង - Kutta ដើម្បីគណនាមុំ។
ជំហានទីប្រាំគឺបញ្ចូលទិន្នន័យចូលគ្នា។យើងផ្សំទិន្នន័យពីឧបករណ៍វាស់ល្បឿននិងហ្គូរ៉ូកូកដើម្បីទទួលបានឥរិយាបថពេញលេញនិងព័ត៌មានទីតាំងរបស់វត្ថុ។នេះអាចត្រូវបានធ្វើដោយប្រើក្បួនដោះស្រាយដូចជាការដោះស្រាយឥរិយាបថដែលមានមូលដ្ឋានលើត្រីវិស័យឬកម្មវិធីដោះស្រាយមុំអយល័រ។
ជំហានទីប្រាំមួយគឺការមើលឃើញលទ្ធផល។យើងប្តូរទិសដៅចលនាវត្ថុដែលបានគណនាទៅជាសំណុំនៃចំណុចមួយនៅក្នុងប្រព័ន្ធកូអរដោនេ 3D មួយហើយបង្ហាញវាដោយប្រើឧបករណ៍មើលឃើញដែលសមស្របសម្រាប់ការយល់ដឹងដែលមានចលនាបន្ថែមទៀតអំពីការផ្លាស់ប្តូររបស់គន្លងចលនារបស់វត្ថុ។
សំណួរដែលគេសួរជាញឹកញាប់ [សំណួរគេសួរញឹកញាប់]
តើ MPU6050 ត្រឹមត្រូវប៉ុណ្ណា?
លទ្ធផលដែលទទួលបានបានបង្ហាញថាមានភាពត្រឹមត្រូវគ្រប់គ្រាន់ក្នុងតម្លៃតិចជាង 1% និងភាពជឿជាក់ដោយធានាបាននូវវិមាត្រនៃជណ្តើរយន្តជណ្តើរយន្តនិងស្តង់ដារខ្ពស់នៃឧស្សាហកម្មលើក។
តើធ្វើដូចម្តេចដើម្បីអានទិន្នន័យពី MPU6050?
ដើម្បីអានការចុះឈ្មោះ MPU6050 ខាងក្នុងមេផ្ញើលក្ខខណ្ឌចាប់ផ្តើមបន្ទាប់ដោយអាសយដ្ឋានទាសករ I2C និងប៊ីតសរសេរហើយបន្ទាប់មកអាសយដ្ឋានចុះឈ្មោះដែលនឹងត្រូវអាន។
3. តើ MPU6050 បានប្រើនៅឯណា?
នៅក្នុងការតាមដានសុខភាពការតាមដាន, ឧបករណ៍តាមដានសុខភាពកាយសម្បទា។នៅក្នុងយន្តហោះគ្មានមនុស្សបើកនិង Quadcopters, MPU6050 ត្រូវបានប្រើសម្រាប់ការគ្រប់គ្រងទីតាំង។ប្រើក្នុងការគ្រប់គ្រងដៃមនុស្សយន្ត។ឧបករណ៍ត្រួតពិនិត្យដៃ។
តើ MPU6050 ជាអ៊ីយូ?
ប្លុកឧបករណ៍ចាប់សញ្ញា MPU6050 របស់ MPU6050 អានទិន្នន័យពីឧបករណ៍ចាប់សញ្ញា MPU-6050 ដែលត្រូវបានភ្ជាប់ទៅនឹងផ្នែករឹង។ការបង្កើនល្បឿនលទ្ធផលនៃអត្រាមុំនិងសីតុណ្ហភាពនៅតាមអ័ក្សនៃឧបករណ៍ចាប់សញ្ញា។
5. តើអ្វីទៅជាដំណើរការរបស់ MPU6050?
នេះគឺជាខួរក្បាលរបស់ MPU6050 ដែលរួមបញ្ចូលគ្នានូវទិន្នន័យដែលមកពីឧបករណ៍វាស់ល្បឿននិង gyroscope ។DMP គឺជាគន្លឹះក្នុងការប្រើ MPU6050 ហើយត្រូវបានពន្យល់លម្អិតនៅពេលក្រោយ។ដូចគ្នានឹង microprocessors ទាំងអស់ដែល DMP ត្រូវការកម្មវិធីបង្កប់ក្នុងគោលបំណងដើម្បីដំណើរការ។
ការធ្វើតេស្តមុខងារ។ផលិតផលដែលមានប្រសិទ្ធិភាពចំណាយខ្ពស់បំផុតហើយសេវាកម្មល្អបំផុតគឺជាការប្តេជ្ញាចិត្តអស់កល្បរបស់យើង។
អត្ថបទក្តៅក្តៅ
- គឺ CR2032 និង CR 206 ដែលអាចផ្លាស់ប្តូរបាន
- Mosfet: និយមន័យគោលការណ៍ការងារនិងការជ្រើសរើស
- ការតំឡើងតំឡើងនិងការធ្វើតេស្តការបកស្រាយដ្យាក្រាមខ្សែភ្លើងបញ្ជូនបន្ត
- CR2016 ទល់នឹង CR2032 តើមានអ្វីខុសគ្នា
- NPN VS. PNP: តើមានអ្វីខុសគ្នា?
- ESP32 VS Stm32: តើអ្នករុករកមួយណាដែលប្រសើរសម្រាប់អ្នក?
- មគ្គុទ្ទេសក៍ដ៏ទូលំទូលាយផ្នែកប្រតិបត្តិការ LM358 មគ្គុទេសក៍ប្រមុខប្រតិបត្ដិការប្រឌិតប្រេស 35: pinouts, ដ្យាក្រាមសៀគ្វី, សមមូល, ឧទាហរណ៍មានប្រយោជន៍
- មគ្គុទេសក៍ប្រៀបធៀប DL2032 VS CR2025 VS CR2025
- ការយល់ដឹងអំពីភាពខុសគ្នានៃ ESP32 និង SP32-S3
- ការវិភាគលម្អិតនៃសៀគ្វីស៊េរី RC
 ស្វែងយល់ពីសមត្ថភាពនិងការដាក់ពាក្យសុំបន្ទះឈីបទំនាក់ទំនងរបស់ NRF24L01
ស្វែងយល់ពីសមត្ថភាពនិងការដាក់ពាក្យសុំបន្ទះឈីបទំនាក់ទំនងរបស់ NRF24L01
2024-04-25
 Tripistor NPN Triens3904 ។ ល។
Tripistor NPN Triens3904 ។ ល។
2024-04-25
លេខផ្នែកក្តៅ
 GRM1555C1E4R7BA01D
GRM1555C1E4R7BA01D- GJM1555C1H1R1WB01D
 CL10A226MPCNUBE
CL10A226MPCNUBE GRM21BR61C105KA01L
GRM21BR61C105KA01L GRM1885C1H3R9BA01D
GRM1885C1H3R9BA01D CC0201JRX7R9BB151
CC0201JRX7R9BB151 08052C183KAT2A
08052C183KAT2A 12062A821FAT2A
12062A821FAT2A 06031C331KA12A
06031C331KA12A T491D337M010AT
T491D337M010AT
- 2DC2412R-7
- RMLV0416EGSB-4S2#AA1
- AK6417AL
- A2557SEBTR-T
- A4984SLPTR-T
- VE-J3Z-CY
- RT0402BRD07160RL
- FAN5702UMP15X
- SN75113NSR
- IRM-30-12
- ST1CC40PUR
- T491A335K004ZT7280
- T491A154K035AT4280
- STM32F103VBI6
- STM6779YWB6F
- T491T476M004ZT7280
- TPS62150AQRGTTQ1
- AD8057ARM-REEL7
- CX20431-21
- CY7C024AV-20AI
- G40N150D
- K9K8G08U0E-SIB0T
- SAK-C164C1-8EN
- STLC60133TR
- SY100ELT20VZITR
- TC55V400FT-85
- UPD78P0208GF
- XC3S5000-5FG900I
- FT5406EE8
- HD74LVC74FPEL
- LPD6803S
- TLC8208FIPWR
- jm38510/11501
- QT2225PRKC
- TDUHC124-000C-03
- TMX320VC5410APGE16
- UPD61540GB-YEU-E2-A
- RC0402JR-07100R
- 1812CC151KAT1A